兆易创新-GD32F30X-RT-Thread移植
GD32F307E-START开发板评测 移植RT-Thread
1. 软硬件平台
- GD32F307E-START Board开发板
- MDK-ARM Keil
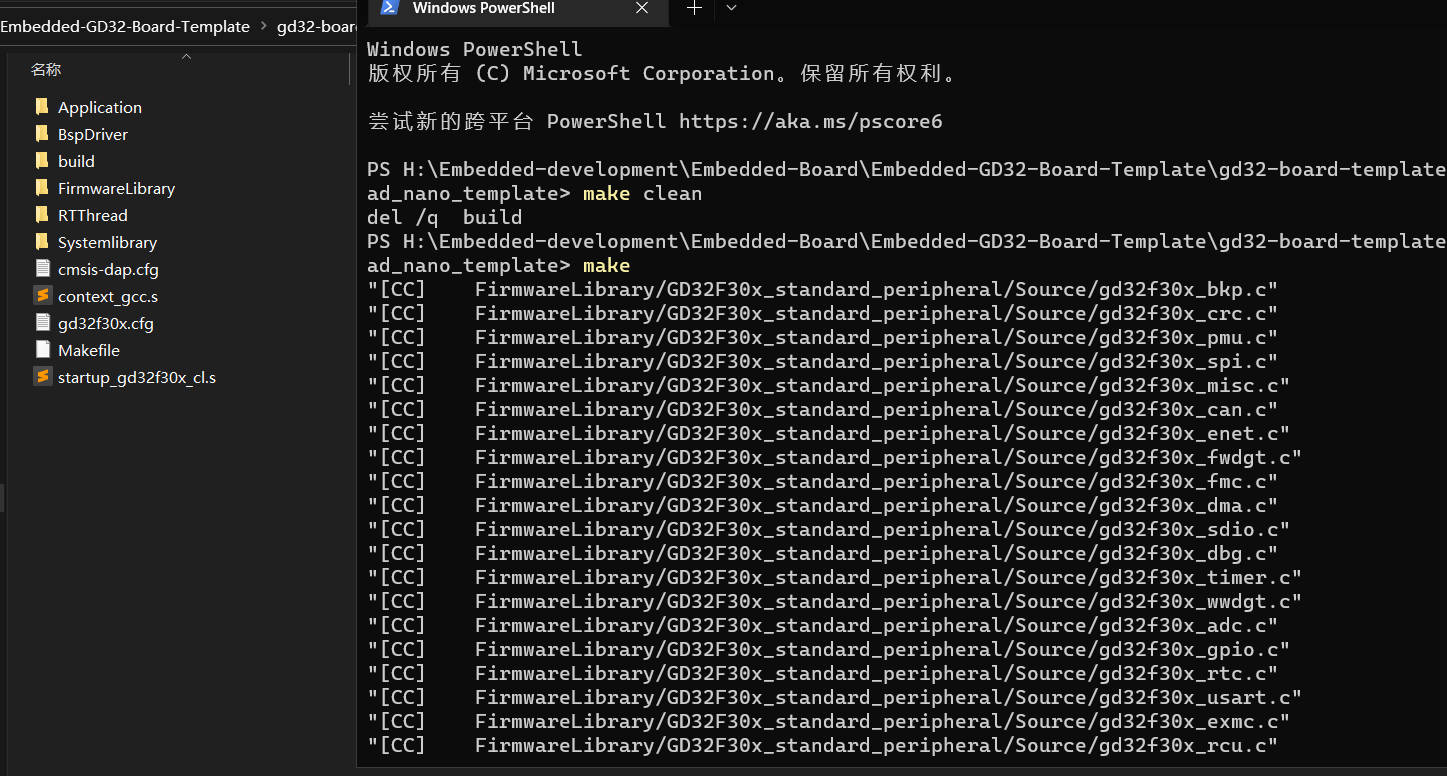
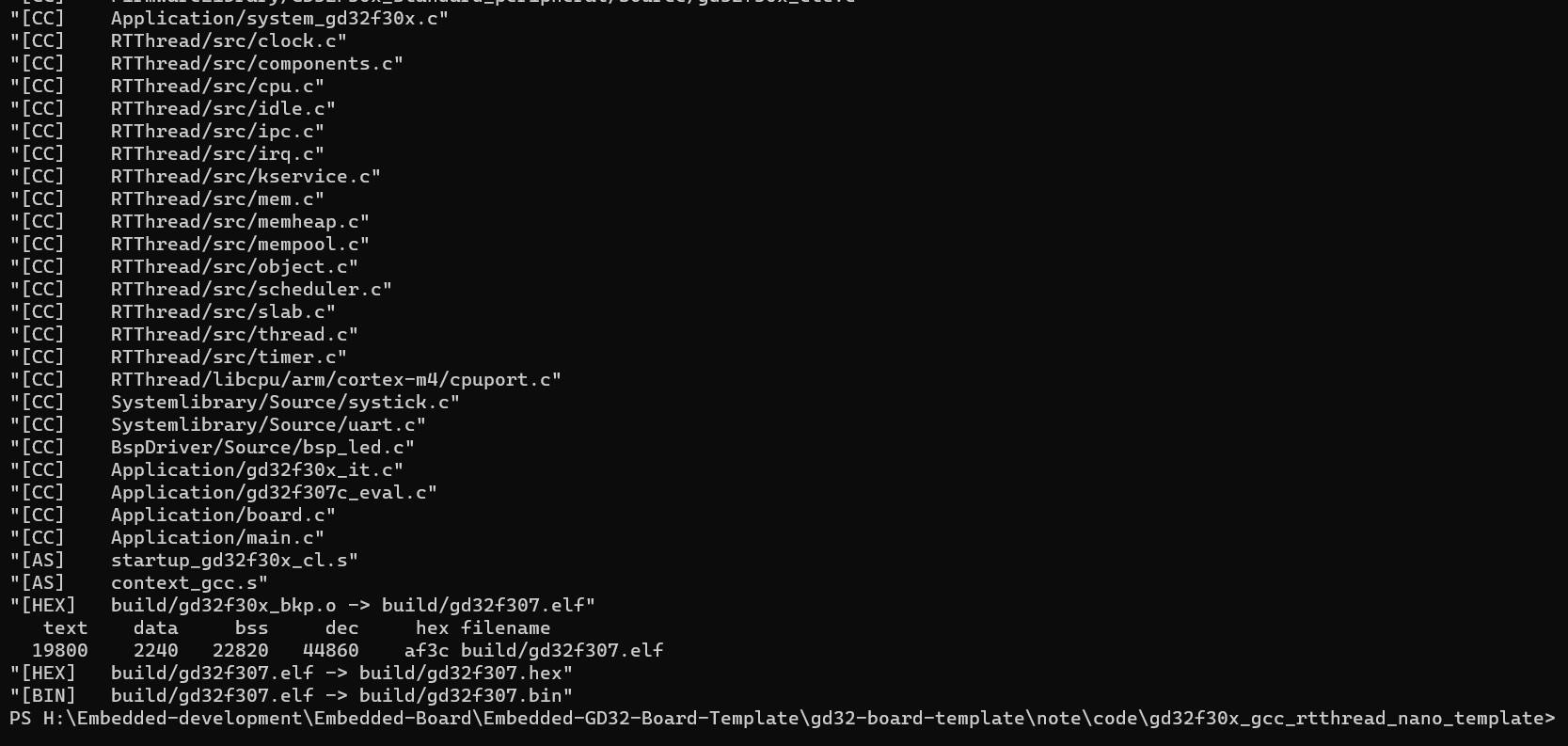
- GCC Makefile
2. 物联网RTOS—RT-Thread
- RT-Thread
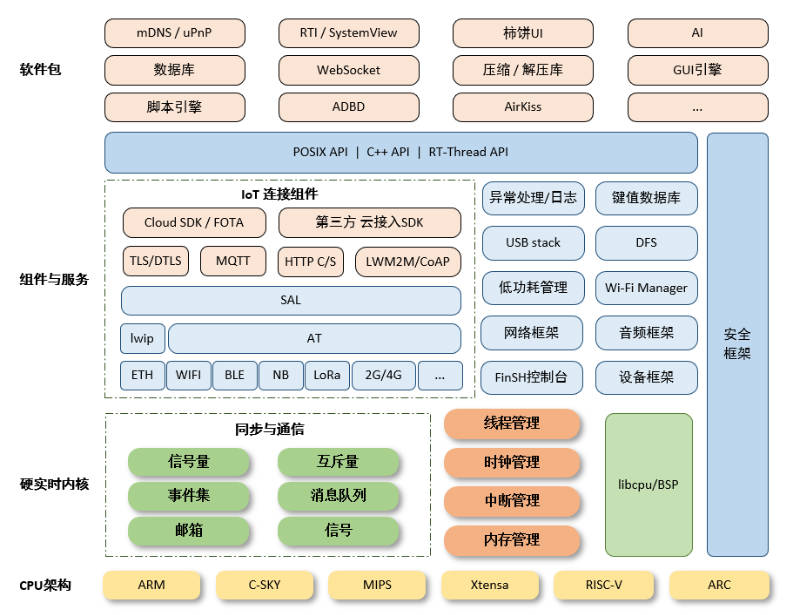
RT-Thread诞生于2006年,是一款以开源、中立、社区化发展起来的物联网操作系统。 RT-Thread主要采用 C 语言编写,浅显易懂,且具有方便移植的特性(可快速移植到多种主流 MCU 及模组芯片上)。RT-Thread把面向对象的设计方法应用到实时系统设计中,使得代码风格优雅、架构清晰、系统模块化并且可裁剪性非常好。RT-Thread完整版,通过在线的软件包管理工具,配合系统配置工具实现直观快速的模块化裁剪,并且可以无缝地导入丰富的软件功能包,从而实现复杂功能。
下图是 RT-Thread 的软件框图:
- RT-Thread Nano
RT-Thread Nano 是一个极简版的硬实时内核,它是由 C 语言开发,采用面向对象的编程思维,具有良好的代码风格,是一款可裁剪的、抢占式实时多任务的 RTOS。其内存资源占用极小,功能包括任务处理、软件定时器、信号量、邮箱和实时调度等相对完整的实时操作系统特性。适用于大量使用的 32 位 ARM 入门级 MCU 的场合。
下图是 RT-Thread Nano 的软件框图,包含支持的 CPU 架构与内核源码,还有可拆卸的 FinSH 组件:
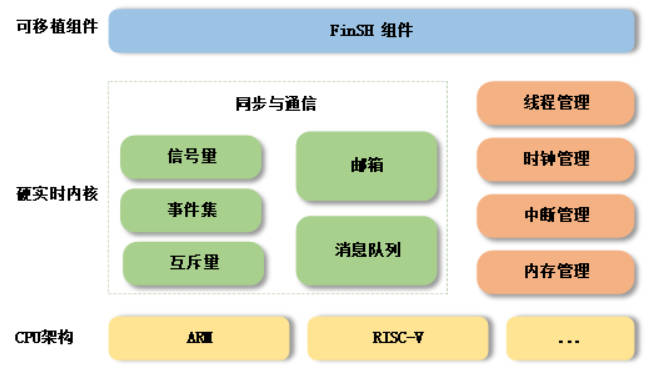
支持架构:ARM:Cortex M0/ M3/ M4/ M7 等、RISC-V 及其他。
功能:线程管理、线程间同步与通信、时钟管理、中断管理、内存管理。
RT-Thread Nano的特点
下载简单
RT-Thread Nano 以软件包的方式集成在 Keil MDK 与 CubeMX 中,可以直接在软件中下载 Nano 软件包获取源码,获取方式详见 基于 Keil MDK 移植 RT-Thread Nano 与 基于 CubeMX 移植 RT-Thread Nano 。同时也提供 下载 Nano 源码压缩包 的途径,方便在其他开发环境移植 RT-Thread Nano,如 基于 IAR 移植 RT-Thread Nano。
代码简单 与RT-Thread 完整版不同的是,Nano 不含 Scons 构建系统,不需要 Kconfig 以及 Env 配置工具,也去除了完整版特有的 device 框架和组件,仅是一个纯净的内核。
移植简单 由于 Nano 的极简特性,使 Nano 的移植过程变得极为简单。添加 Nano 源码到工程,就已完成 90% 的移植工作。
易裁剪:Nano 的配置文件为 rtconfig.h,该文件中列出了内核中的所有宏定义,有些默认没有打开,如需使用,打开即可。
易添加 FinSH 组件:FinSH 组件 可以很方便的在 Nano 上进行移植,而不再依赖 device 框架,只需要对接两个必要的函数即可完成 FinSH 移植。
资源占用小:对 RAM 与 ROM 的开销非常小,在支持 semaphore 和 mailbox 特性,并运行两个线程 (main 线程 + idle 线程) 情况下,ROM 和 RAM 依然保持着极小的尺寸,RAM 占用约 1K 左右,ROM 占用 4K 左右。
移植过程
RT-Thread Nano 内核移植
RT-Thread Nano移植较为简单,参考官方教程。我这里里面可能有少步骤的,大体也差不多。其实我实际对接内核就改了一个SystemClock_Config()函数的实现,其他的基本上没有太大变化,然后就是一些宏定义的打开,特别是你需要使用FINSH组件的时候。
官方移植教程 基于 Keil MDK 移植 RT-Thread Nano
官方移植教程 在 RT-Thread Nano 上添加控制台与 FinSH
- 在之前的工程模板基础上,添加RT-Thread Nano代码文件。在keil里面添加文件即可。
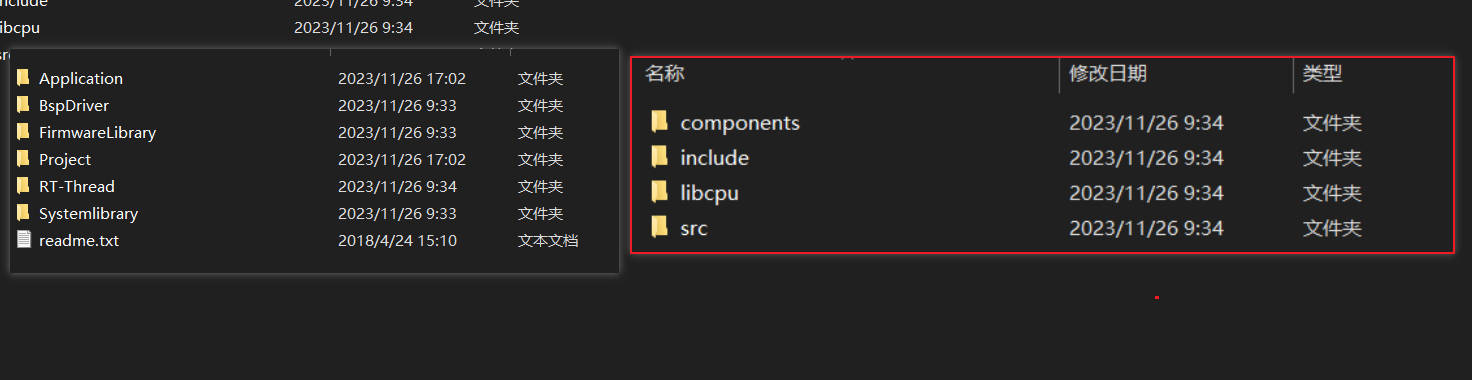
components Finsh include 头文件 libcpu Cortex M0/ M3/ M4/ M7/RISC-V src 内核源代码(重点) 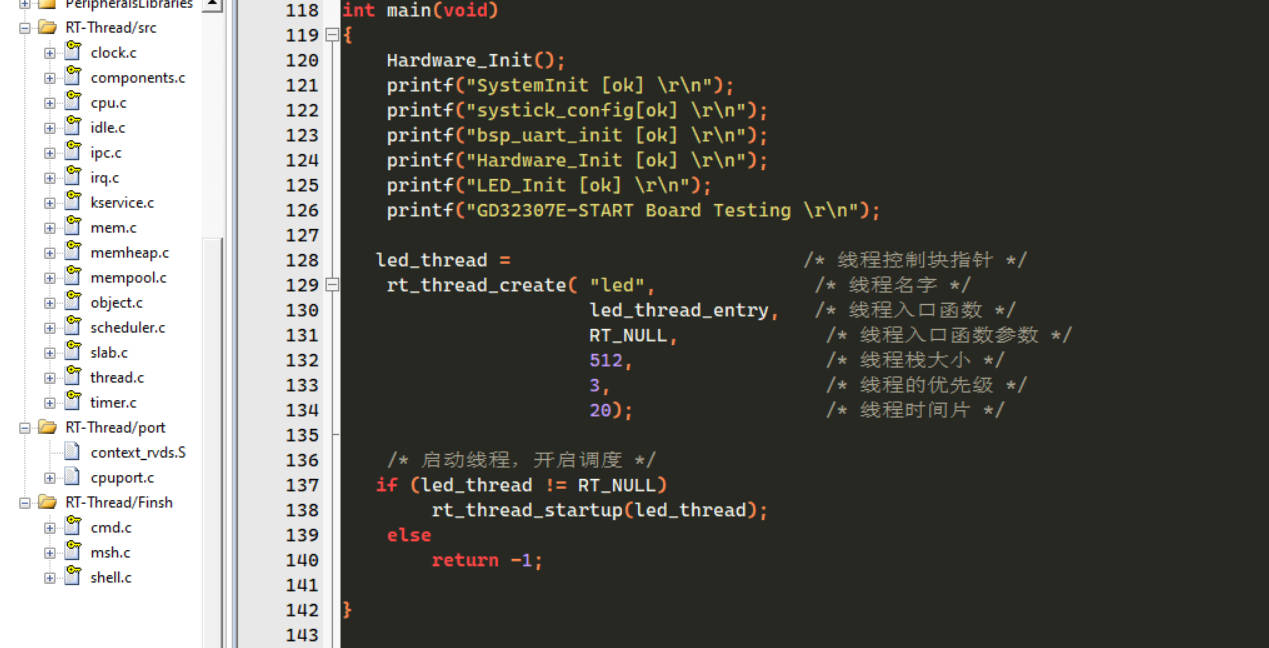
- 需要注意是,RT-Thread/port里面需要选择与芯片匹配的文件,GD32F307E-START Board是Cortex-M4内核的芯片,选择添加相关文件。Cortex-M 芯片内核移植文件如下:

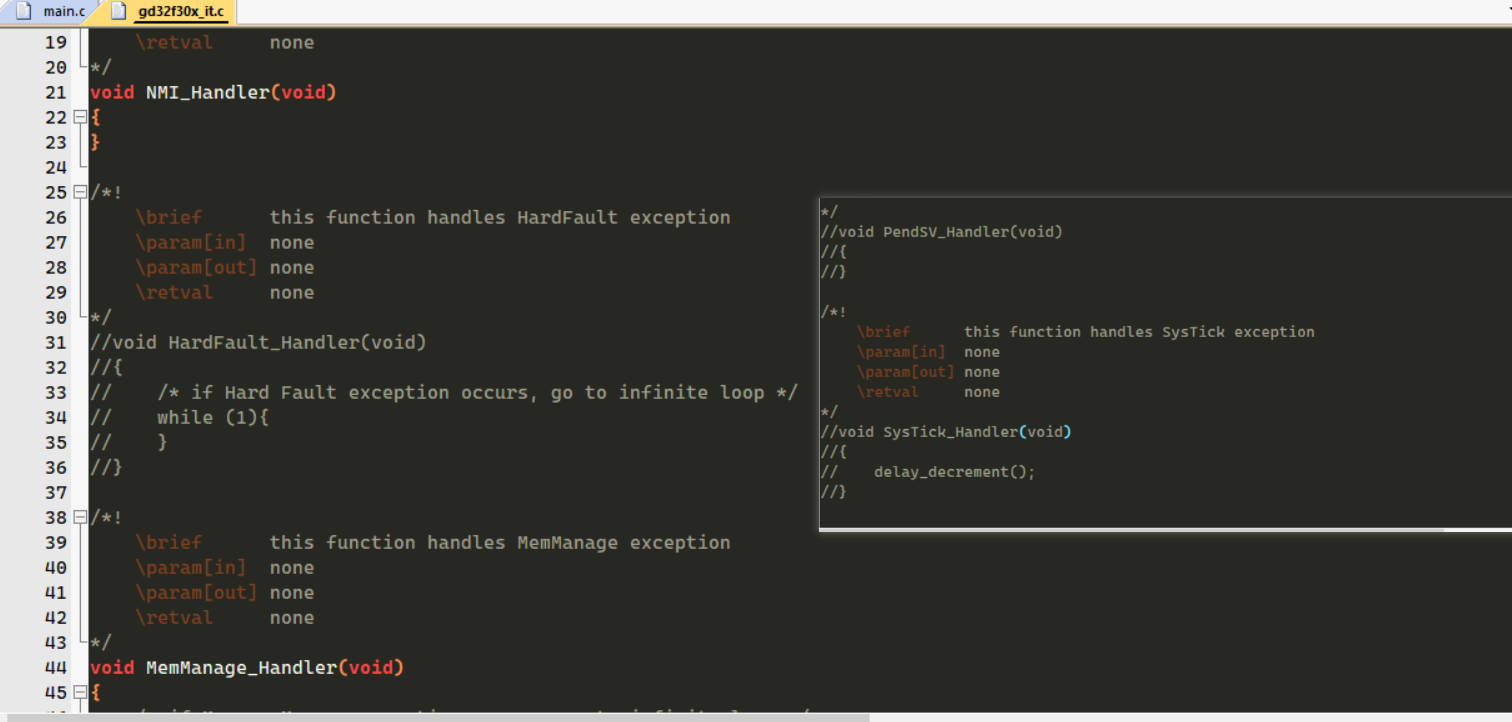
- RT-Thread 会接管异常处理函数
HardFault_Handler()和悬挂处理函数PendSV_Handler(),这两个函数已由 RT-Thread 实现,所以需要删除工程里中断服务例程文件中的这两个函数,避免在编译时产生重复定义。如果此时对工程进行编译,没有出现函数重复定义的错误,则不用做修改。因此在我们的工程里面需要把gd32f30x_it.c文件中的HardFault_Handler、PendSV_Handler、SysTick_Handler函数注释掉。
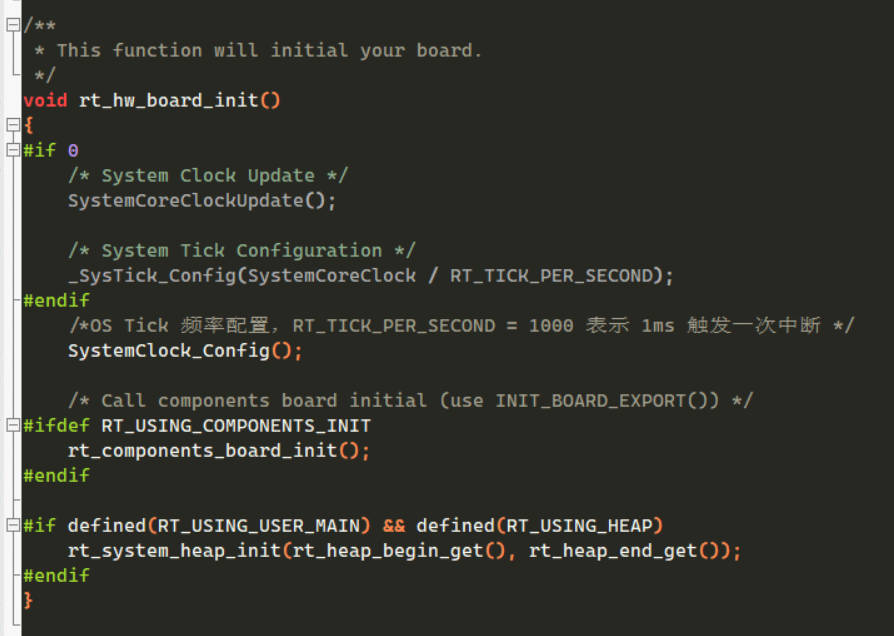
添加board.c rtconfig.h文件,这两个文件非常重要。重点需要修改这两个文件。
修改rt_hw_board_init,SystemClock_Config();你可以main函数里的systick_config();注释掉
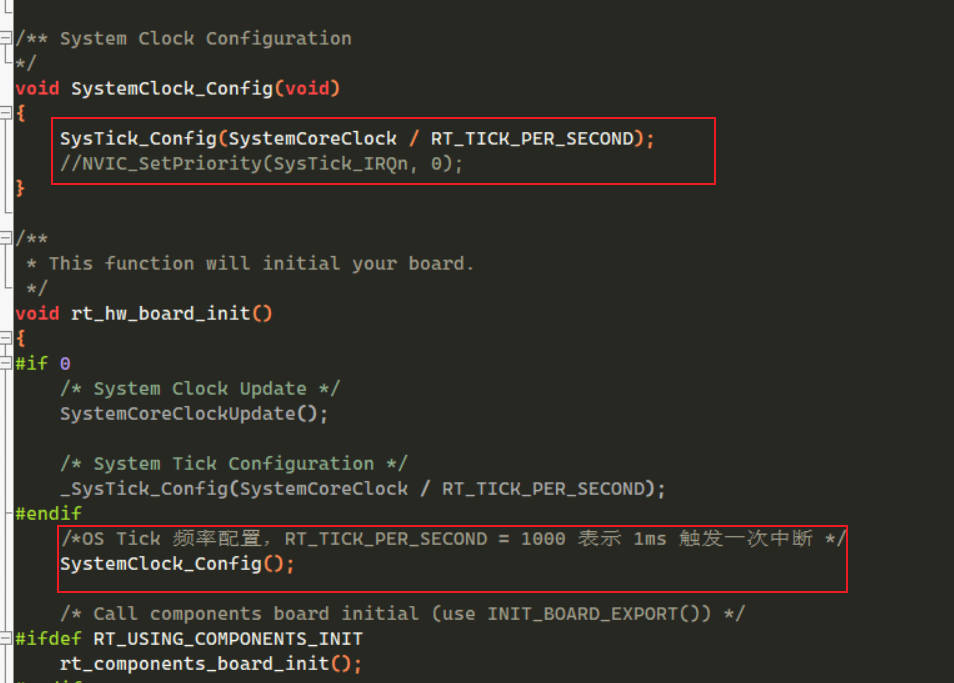
由于
SysTick_Handler()中断服务例程由用户在 board.c 中重新实现,做了系统 OS Tick,所以还需要删除工程里中原本已经实现的SysTick_Handler(),避免在编译时产生重复定义。如果此时对工程进行编译,没有出现函数重复定义的错误,则不用做修改。
系统内存堆的初始化在 board.c 中的 rt_hw_board_init() 函数中完成,内存堆功能是否使用取决于宏 RT_USING_HEAP 是否开启,RT-Thread Nano 默认不开启内存堆功能,这样可以保持一个较小的体积,不用为内存堆开辟空间。开启系统 heap 将可以使用动态内存功能,如使用 rt_malloc、rt_free 以及各种系统动态创建对象的 API。若需要使用系统内存堆功能,则打开 RT_USING_HEAP 宏定义即可,此时内存堆初始化函数 rt_system_heap_init() 将被调用.
初始化内存堆需要堆的起始地址与结束地址这两个参数,系统中默认使用数组作为 heap,并获取了 heap 的起始地址与结束地址,该数组大小可手动更改.

注意:开启 heap 动态内存功能后,heap 默认值较小,在使用的时候需要改大,否则可能会有申请内存失败或者创建线程失败的情况,修改方法有以下两种:
- 可以直接修改数组中定义的 RT_HEAP_SIZE 的大小,至少大于各个动态申请内存大小之和,但要小于芯片 RAM 总大小。
- 也可以参考 《RT-Thread Nano 移植原理》——实现动态内存堆 章节进行修改,使用 RAM ZI 段结尾处作为 HEAP 的起始地址,使用 RAM 的结尾地址作为 HEAP 的结尾地址,这是 heap 能设置的最大值的方法。
编写主程序代码
创建一个线程,同时支持串口打印
/*!
\file main.c
\brief USART printf demo
*/
/*
Copyright (C) 2017 GigaDevice
2018-04-25, V1.0.0, demo for GD32F30x
*/
#include "gd32f30x.h"
#include "systick.h"
#include <stdio.h>
#include <rtthread.h>
#include "bsp_led.h"
/* retarget the C library printf function to the USART */
int fputc(int ch, FILE *f)
{
usart_data_transmit(USART0 , (uint8_t)ch);
while(RESET == usart_flag_get(USART0 , USART_FLAG_TBE));
return ch;
}
/*****************************************************************************
* @brief This function
* @param None
* @retval None
*/
void bsp_uart_init(void)
{
/* enable GPIO clock */
rcu_periph_clock_enable(RCU_GPIOB);
/* enable AF clock */
rcu_periph_clock_enable(RCU_AF);
/* enable USART clock */
rcu_periph_clock_enable(RCU_USART0);
/* connect port to USARTx_Tx */
gpio_init(GPIOB, GPIO_MODE_AF_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_6);
/* connect port to USARTx_Rx */
gpio_init(GPIOB, GPIO_MODE_IN_FLOATING, GPIO_OSPEED_50MHZ, GPIO_PIN_7);
/* USART0 remap configure */
gpio_pin_remap_config(GPIO_USART0_REMAP,ENABLE);
/* USART configure */
usart_deinit(USART0);
usart_baudrate_set(USART0, 115200U);
usart_receive_config(USART0, USART_RECEIVE_ENABLE);
usart_transmit_config(USART0, USART_TRANSMIT_ENABLE);
usart_enable(USART0);
}
/* 定义线程控制块 */
static rt_thread_t led_thread = RT_NULL;
/*
*************************************************************************
* 线程定义
*************************************************************************
*/
static void led_thread_entry(void* parameter)
{
while (1)
{
gpio_bit_set(GPIOC,GPIO_PIN_6);
rt_thread_delay(500); /* 延时500个tick */
rt_kprintf("led_thread running,LED1_ON\r\n");
gpio_bit_reset(GPIOC,GPIO_PIN_6);
rt_thread_delay(500); /* 延时500个tick */
rt_kprintf("led_thread running,LED1_OFF\r\n");
rt_kprintf("led_thread running,LED2_ON\r\n");
rt_thread_delay(500); /* 延时500个tick */
rt_kprintf("led_thread running,LED2_OFF\r\n");
rt_thread_delay(500); /* 延时500个tick */
}
}
/*
*************************************************************************
* 函数声明
*************************************************************************
*/
static void led_thread_entry(void* parameter);
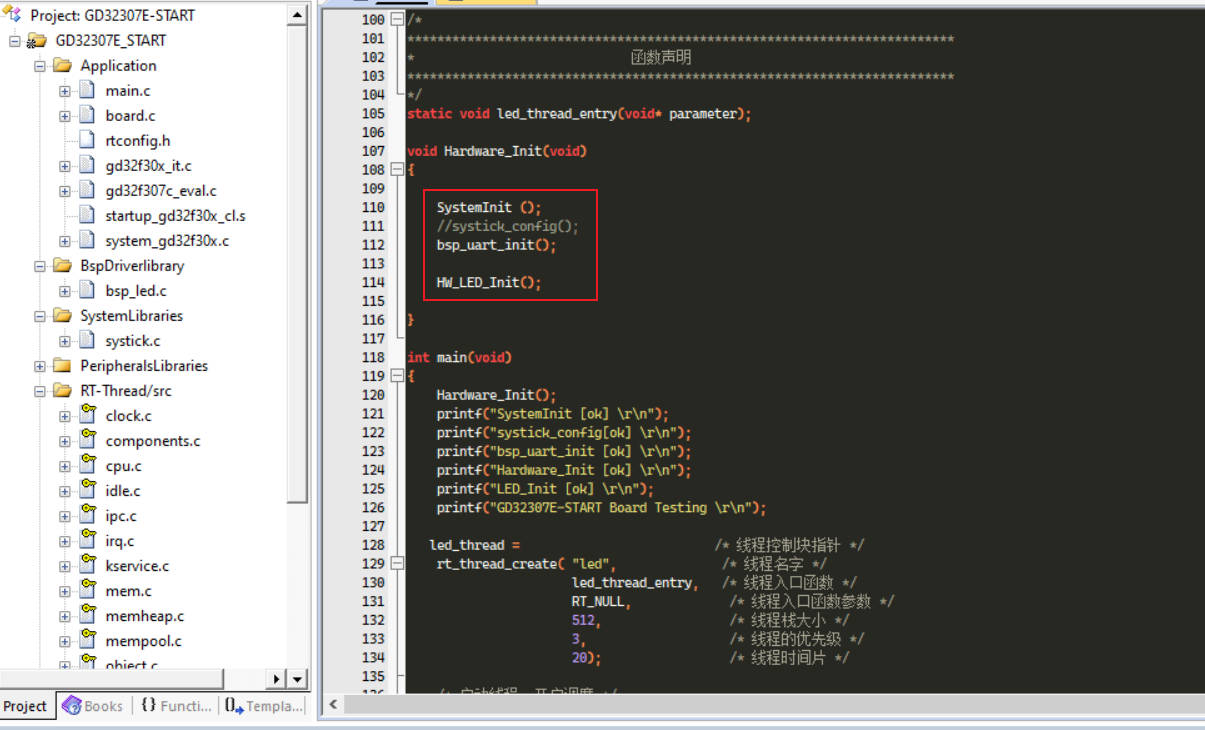
void Hardware_Init(void)
{
SystemInit ();
//systick_config();
bsp_uart_init();
HW_LED_Init();
}
int main(void)
{
Hardware_Init();
printf("SystemInit [ok] \r\n");
printf("systick_config[ok] \r\n");
printf("bsp_uart_init [ok] \r\n");
printf("Hardware_Init [ok] \r\n");
printf("LED_Init [ok] \r\n");
printf("GD32307E-START Board Testing \r\n");
led_thread = /* 线程控制块指针 */
rt_thread_create( "led", /* 线程名字 */
led_thread_entry, /* 线程入口函数 */
RT_NULL, /* 线程入口函数参数 */
512, /* 线程栈大小 */
3, /* 线程的优先级 */
20); /* 线程时间片 */
/* 启动线程,开启调度 */
if (led_thread != RT_NULL)
rt_thread_startup(led_thread);
else
return -1;
}需要注意的是,用于finish打印,实现rt_ktprintf() 此函数可以在kservies.c中实现
如果需要使用Finsh组件,需要添加相关的代码文件,并且添加rt_hw_console_getchar()代码实现
//用于finish打印,实现rt_ktprintf()
//此函数可以在kservies.c中实现
void rt_hw_console_output(const char *str)
{
// printf(str);
rt_size_t i = 0, size = 0;
char a = '\r';
size = rt_strlen(str);
for (i = 0; i < size; i++)
{
if ( *(str+i) == '\n')
{
usart_data_transmit(USART0,a);
while(RESET == usart_flag_get(USART0, USART_FLAG_TBE));
}
usart_data_transmit(USART0, *(str+i));
while(RESET == usart_flag_get(USART0, USART_FLAG_TBE));
}
}
//用于finish输入
char rt_hw_console_getchar(void)
{
int ch =-1;
if( usart_flag_get(USART0,USART_FLAG_RBNE) != RESET)
{
ch = (uint8_t)usart_data_receive(USART0);
}
else{
if ( usart_flag_get(USART0,USART_FLAG_ORERR) != RESET)
{
usart_flag_clear(USART0, USART_FLAG_RBNE);
//rt_thread_mdelay(10);
}
}
return ch;
}
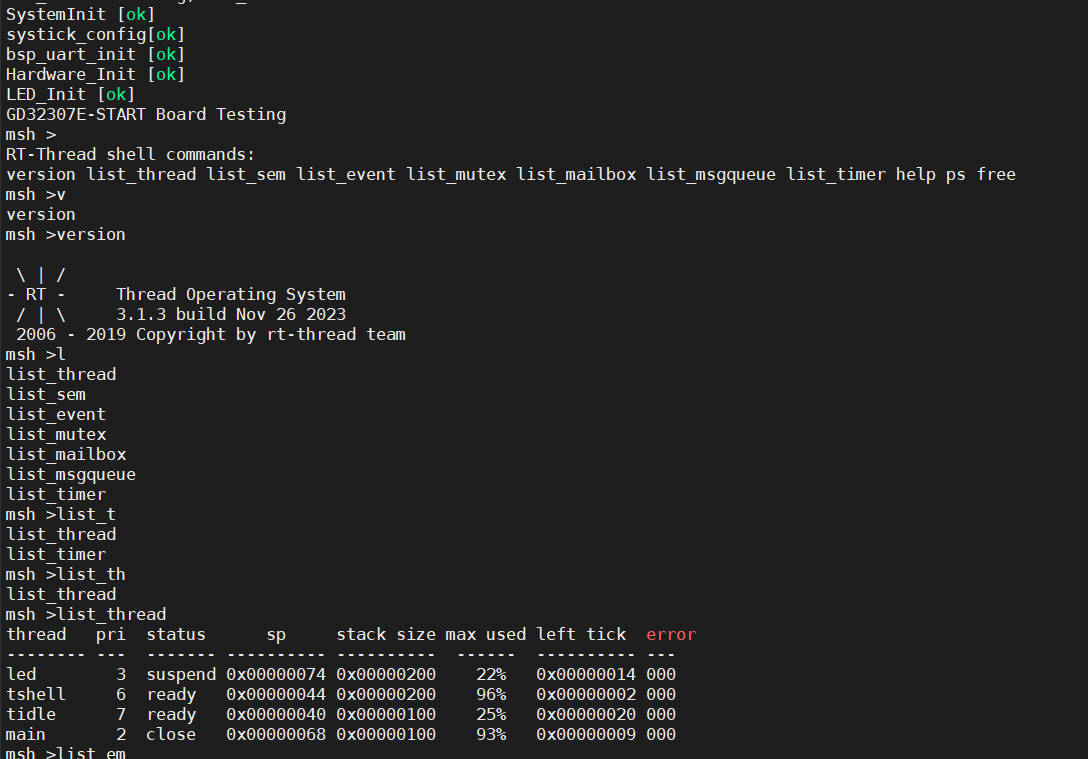
测试效果:
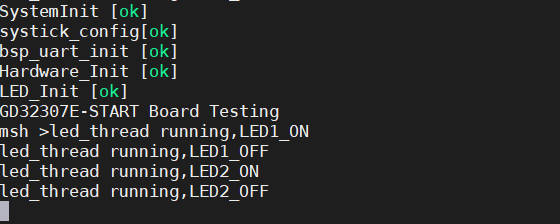
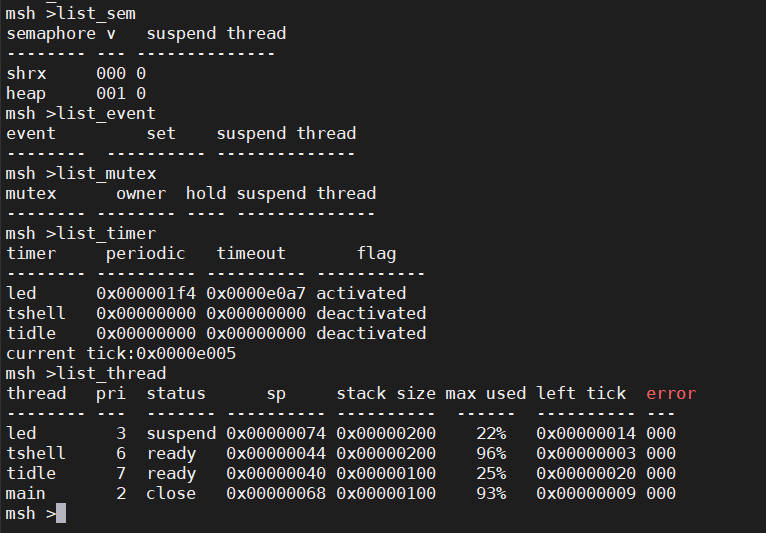
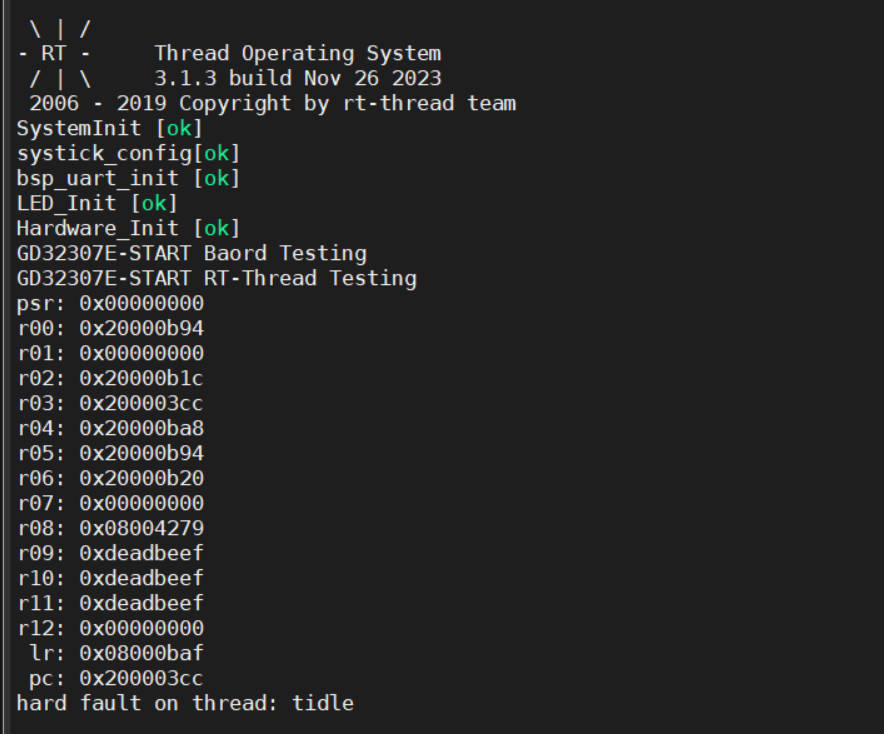
其实gcc的工程 我也进行了实验,但是虽然能下载程序了,但是不能进入内核出现错误,后面有时间再看看吧,有时间继续实践里面的各个example,完成rt-thread的学习。
RT-Thread 完整版测试
在RT-Thread的官方仓库里面有这个板子的bsp,但是我进行了下载程序,不是这个程序的效果。后面有时间再看看吧。
https://gitee.com/rtthread/rt-thread/tree/master/bsp/gd32/arm/gd32307e-start